Opencv中卡尔曼滤波器的使用
时间:2010-04-12 来源:frostmourn716
首先来看一下 OpenCV中关于Kalman滤波的结构和函数定义
CvKalman
Kalman 滤波器状态
typedef struct CvKalman
{
int MP; /* 测量向量维数 */
int DP; /* 状态向量维数 */
int CP; /* 控制向量维数 */
/* 向后兼容字段 */
#if 1
float* PosterState; /* =state_pre->data.fl */
float* PriorState; /* =state_post->data.fl */
float* DynamMatr; /* =transition_matrix->data.fl */
float* MeasurementMatr; /* =measurement_matrix->data.fl */
float* MNCovariance; /* =measurement_noise_cov->data.fl */
float* PNCovariance; /* =process_noise_cov->data.fl */
float* KalmGainMatr; /* =gain->data.fl */
float* PriorErrorCovariance;/* =error_cov_pre->data.fl */
float* PosterErrorCovariance;/* =error_cov_post->data.fl */
float* Temp1; /* temp1->data.fl */
float* Temp2; /* temp2->data.fl */
#endif
CvMat* state_pre; /* 预测状态 (x'(k)):
x(k)=A*x(k-1)+B*u(k) */
CvMat* state_post; /* 矫正状态 (x(k)):
x(k)=x'(k)+K(k)*(z(k)-H*x'(k)) */
CvMat* transition_matrix; /* 状态传递矩阵 state transition matrix (A) */
CvMat* control_matrix; /* 控制矩阵 control matrix (B)
(如果没有控制,则不使用它)*/
CvMat* measurement_matrix; /* 测量矩阵 measurement matrix (H) */
CvMat* process_noise_cov; /* 过程噪声协方差矩阵
process noise covariance matrix (Q) */
CvMat* measurement_noise_cov; /* 测量噪声协方差矩阵
measurement noise covariance matrix (R) */
CvMat* error_cov_pre; /* 先验误差计协方差矩阵
priori error estimate covariance matrix (P'(k)):
P'(k)=A*P(k-1)*At + Q)*/
CvMat* gain; /* Kalman 增益矩阵 gain matrix (K(k)):
K(k)=P'(k)*Ht*inv(H*P'(k)*Ht+R)*/
CvMat* error_cov_post; /* 后验错误估计协方差矩阵
posteriori error estimate covariance matrix (P(k)):
P(k)=(I-K(k)*H)*P'(k) */
CvMat* temp1; /* 临时矩阵 temporary matrices */
CvMat* temp2;
CvMat* temp3;
CvMat* temp4;
CvMat* temp5;
}
CvKalman;
结构 CvKalman 用来保存 Kalman 滤波器状态。它由函数 cvCreateKalman 创建,由函数f cvKalmanPredict 和 cvKalmanCorrect 更新,由 cvReleaseKalman 释放. 通常该结构是为标准 Kalman 所使用的 (符号和公式都借自非常优秀的 Kalman 教程 [Welch95]):
系统运动方程:系统观 测方程:其 中:
xk(xk − 1) - 系统在时刻 k (k-1) 的状态向量 (state of the system at the moment k (k-1))zk - 在时刻 k 的系统状态测量向量 (measurement of the system state at the moment k)uk - 应用于时刻 k 的外部控制 (external control applied at the moment k)wk 和 vk 分别为正态分布的运 动和测量噪声p(w) ~ N(0,Q)p(v) ~ N(0,R),即,Q - 运动噪声的相关矩阵,常量或变量R - 测量噪声的相关矩阵,常量或变量对标准 Kalman 滤波器,所有矩阵: A, B, H, Q 和 R 都是通过 cvCreateKalman 在分配结构 CvKalman 时初始化一次。但是,同样的结构和函数,通过在当前系统状态邻域中线性化扩展 Kalman 滤波器方程,可以用来模拟扩展 Kalman 滤波器,在这种情况下, A, B, H (也许还有 Q 和 R) 在每一步中都被更新。
CreateKalman
分 配 Kalman 滤波器结构
CvKalman* cvCreateKalman( int dynam_params, int measure_params, int control_params=0 );dynam_params状态向量 维数measure_params测量向 量维数control_params控制向 量维数
函数 cvCreateKalman 分配 CvKalman 以及它的所有矩阵和初始参数
ReleaseKalman
释 放 Kalman 滤波器结构
void cvReleaseKalman( CvKalman** kalman );kalman指向 Kalman 滤波器结构的双指针
函数 cvReleaseKalman 释放结构 CvKalman 和里面所有矩阵
KalmanPredict
估计后来的模型状态
const CvMat* cvKalmanPredict( CvKalman* kalman, const CvMat* control=NULL );kalmanKalman 滤波器状态control控制向 量 (uk), 如果没有外部控制 (control_params=0) 应该为 NULL
#define cvKalmanUpdateByTime cvKalmanPredict
函数 cvKalmanPredict 根据当前状态估计后来的随机模型状态,并存储于 kalman->state_pre:
,其 中
x'k 是预测状态 (kalman->state_pre),xk − 1 是前一步的矫正状态 (kalman->state_post),应该在开始的某个地方初始化,即缺省为零向量,uk 是外部控制 (control 参数),P'k 是 先验误差相关矩阵 (kalman->error_cov_pre)Pk − 1 是前一步的后验误差相关矩阵 (kalman->error_cov_post),应该在开始的某个地方初始化,即缺省为单位矩阵.函 数返回估计得到的状态值
KalmanCorrect
调节模型状态
const CvMat* cvKalmanCorrect( CvKalman* kalman, const CvMat* measurement );kalman被更新的 Kalman 结构的指针measurement指向测 量向量的指针,向量形式为 CvMat
#define cvKalmanUpdateByMeasurement cvKalmanCorrect
函数 cvKalmanCorrect 在给定的模型状态的测量基础上,调节随机模型状态:
其 中
zk - 给定测量(mesurement parameter)Kk - Kalman "增益" 矩阵函 数存储调节状态到 kalman->state_post 中并且输出时返回它。
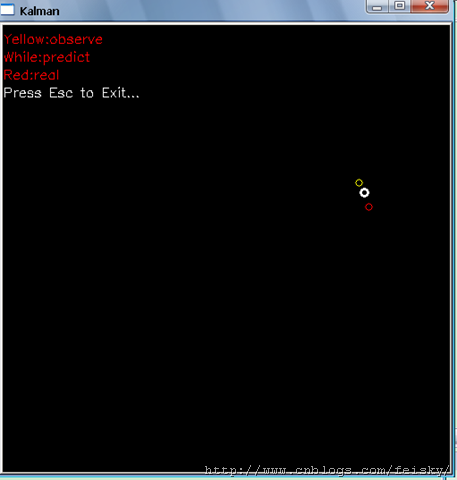
下面实现了一个简单的跟踪小程序, 直接给出程序源码:
void CSLAMApplicationView::OnEKFTracking()
{
// Initialize Kalman filter object, window, number generator, etc
cvNamedWindow( "Kalman", 1 );//创建窗口,当为的时候,表示窗口大小自动设定
CvRandState rng;
cvRandInit( &rng, 0, 1, -1, CV_RAND_UNI );/* CV_RAND_UNI 指定为均匀分布类型、随机数种子为-1 */
IplImage* img = cvCreateImage( cvSize(500,500), 8, 3 );
CvKalman* kalman = cvCreateKalman( 2, 1, 0 );/*状态向量为维,观测向量为维,无激励输入维*/
// State is phi, delta_phi - angle and angular velocity
// Initialize with random guess
CvMat* x_k = cvCreateMat( 2, 1, CV_32FC1 );/*创建行列、元素类型为CV_32FC1,元素为位单通道浮点类型矩阵。*/
cvRandSetRange( &rng, 0, 0.1, 0 );/*设置随机数范围,随机数服从正态分布,均值为,均方差为.1,通道个数为*/
rng.disttype = CV_RAND_NORMAL;
cvRand( &rng, x_k ); /*随机填充数组*/
// Process noise
CvMat* w_k = cvCreateMat( 2, 1, CV_32FC1 );
// Measurements, only one parameter for angle
CvMat* z_k = cvCreateMat( 1, 1, CV_32FC1 );/*定义观测变量*/
cvZero( z_k ); /*矩阵置零*/
// Transition matrix F describes model parameters at and k and k+1
const float F[] = { 1, 1, 0, 1 }; /*状态转移矩阵*/
memcpy( kalman->transition_matrix->data.fl, F, sizeof(F));
/*初始化转移矩阵,行列,具体见CvKalman* kalman = cvCreateKalman( 2, 1, 0 );*/
// Initialize other Kalman parameters
cvSetIdentity( kalman->measurement_matrix, cvRealScalar(1) );/*观测矩阵*/
cvSetIdentity( kalman->process_noise_cov, cvRealScalar(1e-5) );/*过程噪声*/
cvSetIdentity( kalman->measurement_noise_cov, cvRealScalar(1e-1) );/*观测噪声*/
cvSetIdentity( kalman->error_cov_post, cvRealScalar(1) );/*后验误差协方差*/
// Choose random initial state
cvRand( &rng, kalman->state_post );/*初始化状态向量*/
// Make colors
CvScalar yellow = CV_RGB(255,255,0);/*依次为红绿蓝三色*/
CvScalar white = CV_RGB(255,255,255);
CvScalar red = CV_RGB(255,0,0);
while( 1 ){
// Predict point position
const CvMat* y_k = cvKalmanPredict( kalman, 0 );/*激励项输入为*/
// Generate Measurement (z_k)
cvRandSetRange( &rng, 0, sqrt( kalman->measurement_noise_cov->data.fl[0] ), 0 );/*设置观测噪声*/
cvRand( &rng, z_k );
cvMatMulAdd( kalman->measurement_matrix, x_k, z_k, z_k );
// Update Kalman filter state
cvKalmanCorrect( kalman, z_k );
// Apply the transition matrix F and apply "process noise" w_k
cvRandSetRange( &rng, 0, sqrt( kalman->process_noise_cov->data.fl[0] ), 0 );/*设置正态分布过程噪声*/
cvRand( &rng, w_k );
cvMatMulAdd( kalman->transition_matrix, x_k, w_k, x_k );
// Plot Points
cvZero( img );/*创建图像*/
// Yellow is observed state 黄色是观测值
//cvCircle(IntPtr, Point, Int32, MCvScalar, Int32, LINE_TYPE, Int32)
//对应于下列其中,shift为数据精度
//cvCircle(img, center, radius, color, thickness, lineType, shift)
//绘制或填充一个给定圆心和半径的圆
cvCircle( img,
cvPoint( cvRound(img->width/2 + img->width/3*cos(z_k->data.fl[0])),
cvRound( img->height/2 - img->width/3*sin(z_k->data.fl[0])) ),
4, yellow );
// White is the predicted state via the filter
cvCircle( img,
cvPoint( cvRound(img->width/2 + img->width/3*cos(y_k->data.fl[0])),
cvRound( img->height/2 - img->width/3*sin(y_k->data.fl[0])) ),
4, white, 2 );
// Red is the real state
cvCircle( img,
cvPoint( cvRound(img->width/2 + img->width/3*cos(x_k->data.fl[0])),
cvRound( img->height/2 - img->width/3*sin(x_k->data.fl[0])) ),
4, red );
CvFont font;
cvInitFont(&font,CV_FONT_HERSHEY_SIMPLEX,0.5f,0.5f,0,1,8);
cvPutText(img,"Yellow:observe",cvPoint(0,20),&font,cvScalar(0,0,255));
cvPutText(img,"While:predict",cvPoint(0,40),&font,cvScalar(0,0,255));
cvPutText(img,"Red:real",cvPoint(0,60),&font,cvScalar(0,0,255));
cvPutText(img,"Press Esc to Exit...",cvPoint(0,80),&font,cvScalar(255,255,255));
cvShowImage( "Kalman", img );
// Exit on esc key
if(cvWaitKey(100) == 27)
break;
}
cvReleaseImage(&img);/*释放图像*/
cvReleaseKalman(&kalman);/*释放kalman滤波对象*/
cvDestroyAllWindows();/*释放所有窗口*/
}
参 考:opencv中文论坛
另外我的程序还实现了图片的打开和保存功能,具 体也是参考了论坛的MFC中应用Opencv的帖子,不过我稍微改进了一下,不进行图片的缩放,显示源图像的大小:
首先是doc类定义CImage* m_Image;
CSLAMApplicationDoc::CSLAMApplicationDoc()
{
m_Image=NULL;
}
CSLAMApplicationDoc::~CSLAMApplicationDoc()
{
if(m_Image!=NULL)
{
m_Image->Destroy();
delete m_Image;
}
}
// CSLAMApplicationDoc 命令
BOOL CSLAMApplicationDoc::OnOpenDocument(LPCTSTR lpszPathName)
{
if (!CDocument::OnOpenDocument(lpszPathName))
return FALSE;
// TODO: Add your specialized creation code here
m_Image=new CImage();
m_Image->Load(lpszPathName);
return TRUE;
}
BOOL CSLAMApplicationDoc::OnSaveDocument(LPCTSTR lpszPathName)
{
// TODO: Add your specialized code here and/or call the base class
m_Image->Save(lpszPathName);
return CDocument::OnSaveDocument(lpszPathName);
}
// CSLAMApplicationView 绘制
void CSLAMApplicationView::OnDraw(CDC* pDC)
{
CSLAMApplicationDoc* pDoc = GetDocument();
ASSERT_VALID(pDoc);
if (!pDoc)
return;
// TODO: 在此处为本机数据添加绘制代码
CImage *img=pDoc->m_Image;
if(img!=NULL)
{
CRect r;
GetClientRect (&r);
if(img->Width()<r.Width())
{
r.right=img->Width();
}
if(img->Height()<r.Height())
{
r.bottom=img->Height();
}
pDoc->m_Image->DrawToHDC(pDC->GetSafeHdc(),r);
}

相关阅读 更多 +
排行榜 更多 +